Um display de sete segmentos, é um tipo de display (mostrador) barato usado como alternativa a displays de matriz de pontos mais complexos e dispendiosos. Displays de sete segmentos são comumente usados em eletrônica como forma de exibir uma informação alfanumérica (binário, octal, decimal ou hexadecimal) que possa ser prontamente compreendida pelo usuário sobre as operações internas de um dispositivo. Seu uso é corriqueiro por se tratar de uma opção barata, funcional e de fácil configuração.


Construção
A sua construção é feita com Leds ligados de 2 formas:- Katodo comum: onde é necessário colocar um nível de tensão positivo (nível lógico “1”) para ligar o segmento.

- Anodo comum: onde é necessário colocar um nível de tensão baixo ou GND (nível lógico “0”) para ligar o segmento.

Conceito e estrutura visual:
Os segmentos individuais de um display de sete segmentos.Um display de sete segmentos, como seu nome indica, é composto de sete elementos, os quais podem ser ligados ou desligados individualmente. Eles podem ser combinados para produzir representações simplificadas de algarismos arábicos. Frequentemente, os sete segmentos são dispostos de forma oblíqua ou itálica, o que melhora a legibilidade.
Os sete segmentos são dispostos num retângulo com dois segmentos verticais em cada lado e um segmento horizontal em cima e em baixo. Em acréscimo, o sétimo segmento bissecta o retângulo horizontalmente. Também existem displays de quatorze segmentos e de dezesseis segmentos (para exibição plena de caracteres alfanuméricos) todavia, estes têm sido substituídos em sua maioria por displays de matriz de pontos. Os segmentos de um display de sete segmentos são definidos pelas letras de A a G, conforme indicado à direita, onde o ponto decimal opcional DP (um "oitavo segmento") é usado para a exibição de números não-inteiros.
Exibição dos números
A animação à esquerda passa pelos glifos comuns dos dez numerais e seis "letras-dígito" em hexadecimal (A–F). A variação entre letras maiúsculas e minúsculas para A–F é feita para que cada letra tenha uma forma única e inequívoca (A, C, E e F são maiúsculos, já B e D são minúsculos, pois caso contrário se confundiriam com 8 e 0). Para a exibição de cada número/caractere usa-se um conjunto de segmentos diferentes. As mais comuns são:Simulação de um display LED de sete segmentos exibindo os 16 dígitos hex.
- 0 (Zero) - a, b, c, d, e, f
- 1 (Um) - b, c
- 2 (dois) - a, b, d, e, g
- 3 (três) - a, b, c, d, g
- 4 (quatro) - b, c, f, g
- 5 (cinco) - a, c, d, f, g
- 6 (seis) - a, c, d, e, f, g
- 7 (sete) - a, b, c
- 8 (oito) - a, b, c, d, e, f, g (todos)
- 9 (nove) - a, b, c, f, g
- A (maiúsculo) - a, b, c, e, f, g
- B (minúsculo) - c, d, e, f, g
- C (maiúsculo) - a, d, e, f
- D (minúsculo) - b, c, d, e, g
- E (maiúsculo) - a, d, e, f, g
- F (maiúsculo) - a, e, f, g
Obs.: Dentre os números, 0, 6, 7 e 9 podem ser representados por glifos diferentes dos citados acima em displays de sete segmentos, entretanto, na imagem, todos os dígitos se assemelham aos indicados.
Atividade
Elaborar um programa em linguagem “C” para o PIC18F4550 de forma a ler um nibble (conjunto de 4 bits) colocados na porta B (B3..B0) e mostrar um display de 7 segmentos katodo comum colocado na porta D (D6..D0).
Lógica de programação
- Associa o valor da entrada com o código correspondente
- Escreve o valor associado no display
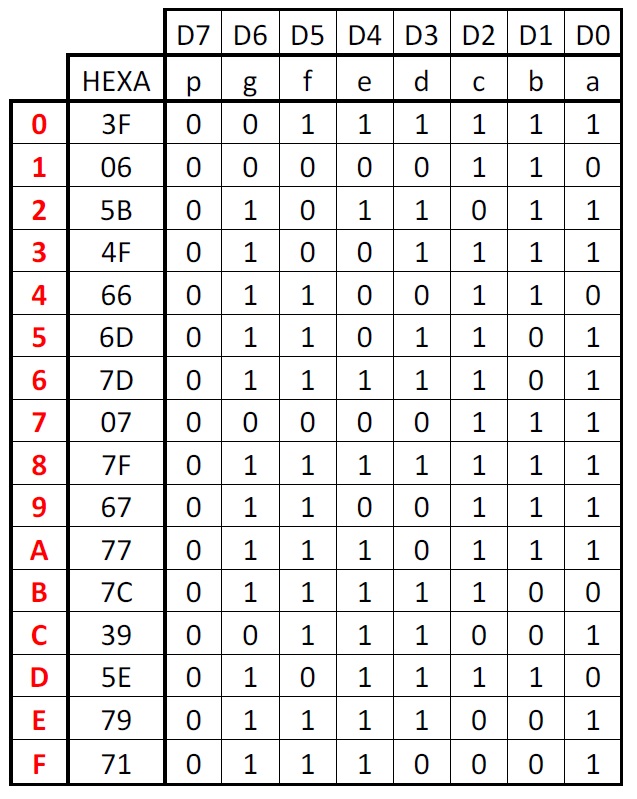
Tabela de conversão de acordo com a ligação do circuito (display 7 segmentos katodo comum
Atividade Adicional
Elabore o mesmo programa / tabela de saída para funcionamento com display de 7 segmentos anodo comum